STM32F407使用回环模式无法收到数据,显示发送成功
开发工具:CUBEIDE
开发板芯片:F407ZGT6
开发板:野火 霸天虎V1
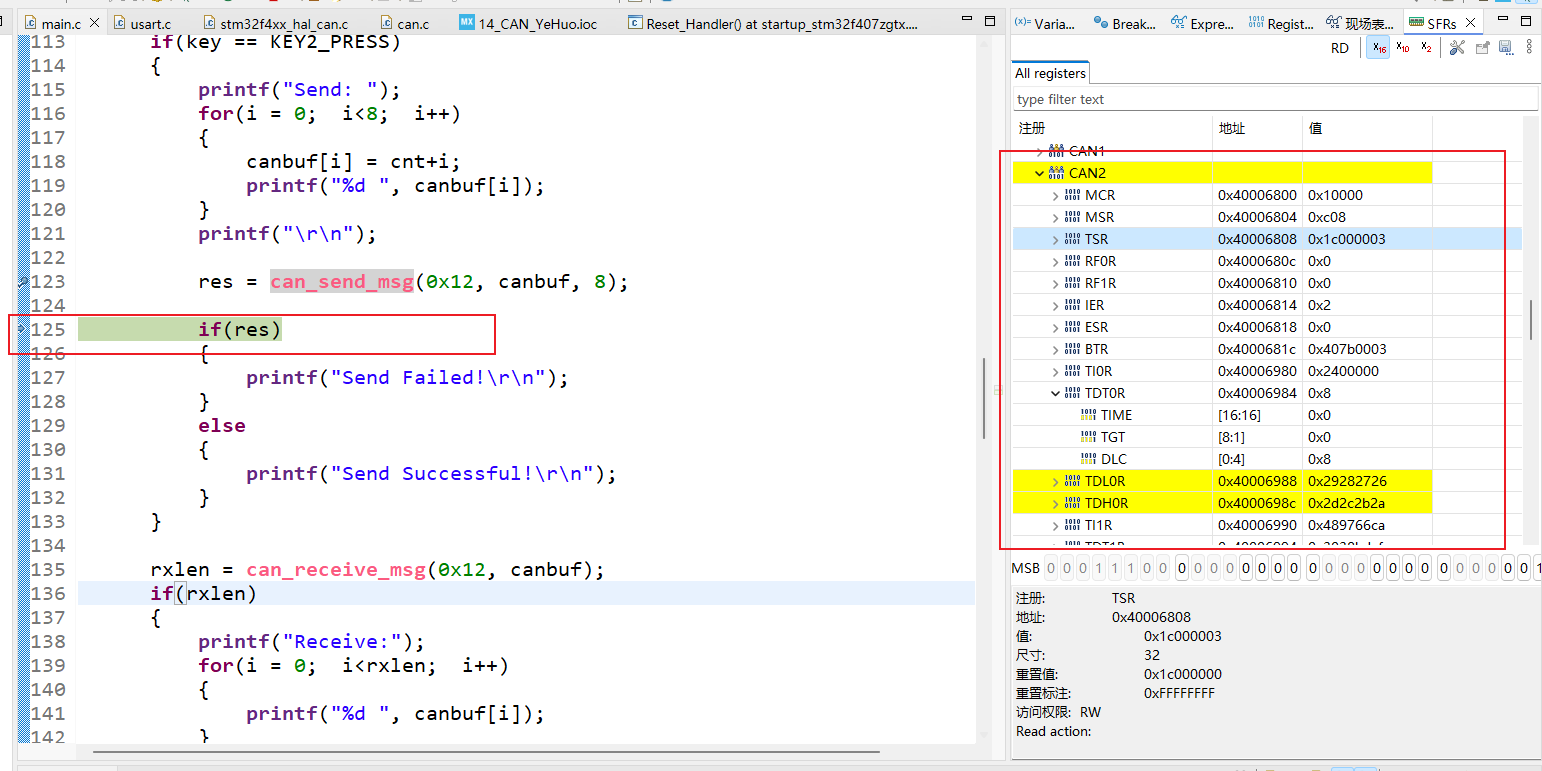
现象如下:CAN回环模式测试,通过监视寄存器发现数据已进入发送邮箱,TSR寄存器的RQCP0和TXOK0值为1,说明发送成功,但是寄存器FIFO0的RF0R寄存器值为0,数据未进入FIFO
已用KEIL下载官方回环例程,官方例程能正常通信,说明CAN设备正常,有大佬帮忙看看这个是什么问题吗?
暂不知道怎么贴附件,放一个工程文件链接https://www.alipan.com/s/hcwDysT4Q4o
已设置筛选器为不过滤,激活FIFO0的接收寄存器,具体代码见后文代码块
寄存器值如下:
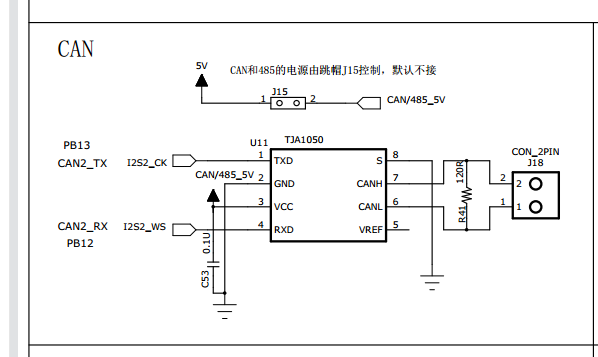
原理图如下:
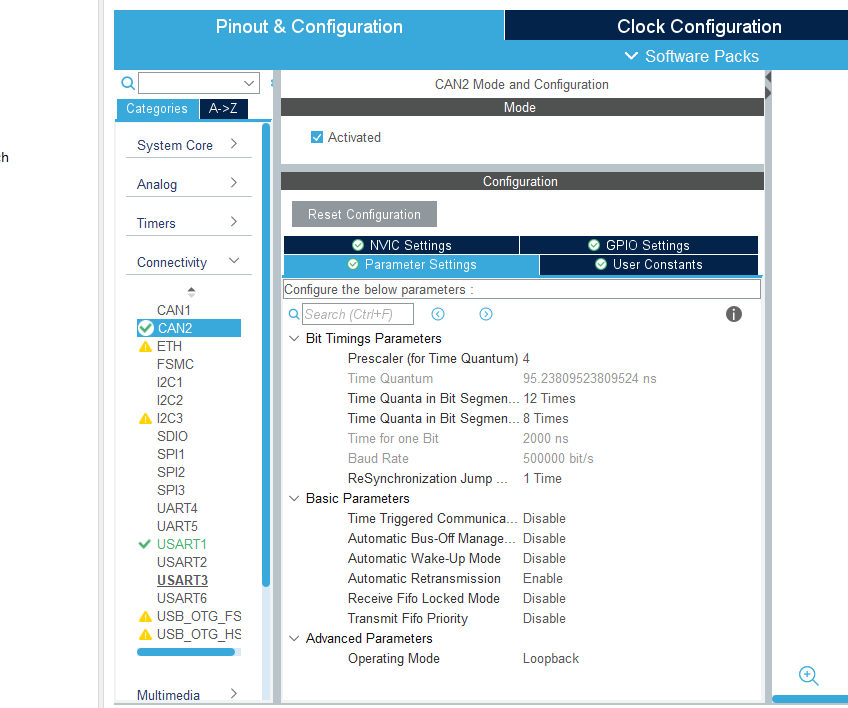
通过CUBEIDE设置CAN2如下:
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "can.h"
/* USER CODE BEGIN 0 */
CAN_TxHeaderTypeDef g_canx_txheader; /* 发送参数句柄 */
CAN_RxHeaderTypeDef g_canx_rxheader; /* 接收参数句柄 */
CAN_FilterTypeDef sFilterConfig;
/* USER CODE END 0 */
CAN_HandleTypeDef hcan2;
/* CAN2 init function */
void MX_CAN2_Init(void)
{
/* USER CODE BEGIN CAN2_Init 0 */
CAN_FilterTypeDef sFilterConfig; /*配置 CAN 过滤器*/
/* USER CODE END CAN2_Init 0 */
/* USER CODE BEGIN CAN2_Init 1 */
/* USER CODE END CAN2_Init 1 */
hcan2.Instance = CAN2;
hcan2.Init.Prescaler = 4;
hcan2.Init.Mode = CAN_MODE_LOOPBACK;
hcan2.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan2.Init.TimeSeg1 = CAN_BS1_12TQ;
hcan2.Init.TimeSeg2 = CAN_BS2_8TQ;
hcan2.Init.TimeTriggeredMode = DISABLE;
hcan2.Init.AutoBusOff = DISABLE;
hcan2.Init.AutoWakeUp = DISABLE;
hcan2.Init.AutoRetransmission = ENABLE;
hcan2.Init.ReceiveFifoLocked = DISABLE;
hcan2.Init.TransmitFifoPriority = DISABLE;
if (HAL_CAN_Init(&hcan2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN CAN2_Init 2 */
//配置过滤器
sFilterConfig.FilterBank = 0; // 过滤器组编号
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; // 过滤器模式
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; // 过滤器尺度
sFilterConfig.FilterIdHigh = 0x0000; // 过滤器 ID 高 16 位
sFilterConfig.FilterIdLow = 0x0000; // 过滤器 ID 低 16 位
sFilterConfig.FilterMaskIdHigh = 0x0000; // 过滤器掩码高 16 位
sFilterConfig.FilterMaskIdLow = 0x0000; // 过滤器掩码低 16 位
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0; // 过滤器分配给 FIFO 0
sFilterConfig.FilterActivation = ENABLE; // 使能过滤器
sFilterConfig.SlaveStartFilterBank = 14; // CAN2 的过滤器起始位置
if(HAL_CAN_ConfigFilter(&hcan2, &sFilterConfig) != HAL_OK)
{ /*过滤器配置*/
Error_Handler();
}
if(HAL_CAN_Start(&hcan2) != HAL_OK)
{ /*启动CAN外围设备*/
Error_Handler();
}
/*使能中断接收,FIFO0消息挂号中断允许,选则CAN外设中断源为“ CAN 接收 FIFO 0 消息挂起中断”,
* 同时需要使能打开CAN的中断响应,此处未写是因在可视化界面已配置,
* 会在HAL_CAN_Init初始化时调用的HAL_CAN_MspInit函数中进行使能*/
//__HAL_CAN_ENABLE_IT(&hcan2, CAN_IT_RX_FIFO0_MSG_PENDING);
HAL_CAN_ActivateNotification(&hcan2, CAN_IT_RX_FIFO0_MSG_PENDING);
/* USER CODE END CAN2_Init 2 */
}
void HAL_CAN_MspInit(CAN_HandleTypeDef* canHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(canHandle->Instance==CAN2)
{
/* USER CODE BEGIN CAN2_MspInit 0 */
/* USER CODE END CAN2_MspInit 0 */
/* CAN2 clock enable */
__HAL_RCC_CAN2_CLK_ENABLE();
__HAL_RCC_CAN1_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/**CAN2 GPIO Configuration
PB12 ------> CAN2_RX
PB13 ------> CAN2_TX
*/
GPIO_InitStruct.Pin = GPIO_PIN_12|GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_CAN2;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* CAN2 interrupt Init */
HAL_NVIC_SetPriority(CAN2_RX0_IRQn, 1, 0);
HAL_NVIC_EnableIRQ(CAN2_RX0_IRQn);
/* USER CODE BEGIN CAN2_MspInit 1 */
/* USER CODE END CAN2_MspInit 1 */
}
}
void HAL_CAN_MspDeInit(CAN_HandleTypeDef* canHandle)
{
if(canHandle->Instance==CAN2)
{
/* USER CODE BEGIN CAN2_MspDeInit 0 */
/* USER CODE END CAN2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_CAN2_CLK_DISABLE();
__HAL_RCC_CAN1_CLK_DISABLE();
/**CAN2 GPIO Configuration
PB12 ------> CAN2_RX
PB13 ------> CAN2_TX
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_12|GPIO_PIN_13);
/* CAN2 interrupt Deinit */
HAL_NVIC_DisableIRQ(CAN2_RX0_IRQn);
/* USER CODE BEGIN CAN2_MspDeInit 1 */
/* USER CODE END CAN2_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
/**
* * @brief CAN 发送一组数据
* * @note 发送格式固定为: 标准 ID, 数据帧
* * @param id : 标准 ID(11 位)
* * @retval 发送状态 0, 成功; 1, 失败;
* */
uint8_t can_send_msg(uint32_t id, uint8_t *msg, uint8_t len)
{
uint32_t TxMailBox = CAN_TX_MAILBOX0;
g_canx_txheader.StdId = id; /*标准标识符*/
g_canx_txheader.ExtId = id; /*扩展标识符(29位)*/
g_canx_txheader.IDE = CAN_ID_STD; /* 使用标准帧 */
g_canx_txheader.RTR = CAN_RTR_DATA; /* 数据帧 */
g_canx_txheader.DLC = len;
if(HAL_CAN_AddTxMessage(&hcan2, &g_canx_txheader, msg, &TxMailBox) != HAL_OK)
{
return 1;
}
/*等待发送完成,所有邮箱为空(3个邮箱)*/
while(HAL_CAN_GetTxMailboxesFreeLevel(&hcan2) !=3);
return 0;
}
/** * @brief CAN 接收数据查询
* * @note 接收数据格式固定为: 标准 ID, 数据帧
* * @param id : 要查询的 标准 ID(11 位)
* * @param buf : 数据缓存区
* * @retval 接收结果
* * @arg 0 , 无数据被接收到;
* * @arg 其他, 接收的数据长度
* */
uint8_t can_receive_msg(uint32_t id, uint8_t *buf)
{
if(HAL_CAN_GetRxFifoFillLevel(&hcan2, CAN_RX_FIFO0) == 0)
{
return 0;
}
if(HAL_CAN_GetRxMessage(&hcan2, CAN_RX_FIFO0, &g_canx_rxheader, buf) != HAL_OK)
{
return 0;
}
/*接收到的ID不对/不是标准帧/不是数据帧*/
if(g_canx_rxheader.StdId != id || g_canx_rxheader.IDE != CAN_ID_STD || g_canx_rxheader.RTR != CAN_RTR_DATA)
{
return 0;
}
return g_canx_rxheader.DLC;
}
/* USER CODE END 1 */
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "can.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "../../BSP/LED/led.h"
#include "../../SYSTEM/delay/delay.h"
#include "../../BSP/BEEF/beef.h"
#include "../../BSP/KEY/key.h"
#include "string.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t key;
uint8_t i = 0;
uint8_t cnt = 0;
uint8_t canbuf[8];
uint8_t rxlen = 0;
uint8_t res;
uint16_t times = 0;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
delay_init(84);
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_CAN2_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
key = key_scan(0);
if(key == KEY2_PRESS)
{
printf("Send: ");
for(i = 0; i<8; i++)
{
canbuf[i] = cnt+i;
printf("%d ", canbuf[i]);
}
printf("\r\n");
res = can_send_msg(0x12, canbuf, 8);
if(res)
{
printf("Send Failed!\r\n");
}
else
{
printf("Send Successful!\r\n");
}
}
rxlen = can_receive_msg(0x12, canbuf);
if(rxlen)
{
printf("Receive:");
for(i = 0; i<rxlen; i++)
{
printf("%d ", canbuf[i]);
}
printf("\r\n");
}
times++;
if(times %200 == 0)
printf("Please Press KEY2 To Send Message!\r\n");
if(times % 30 == 0)
{
cnt++;
LED_R_TOGGLE();
}
delay_ms(10);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
浏览 (1518)
点赞
收藏
评论
请 登录后发表观点
暂无数据